My research explores how distributed systems acquire, process, and act on information, from immune cells and ant colonies to robot swarms, autonomous drones, infrastructure monitoring, climate systems, volcanology, and astrobiology.
Mahsa Sanei, Ali Mohammadkhorasani, G. Matthew Fricke, and Fernando Moreu.
Computers in Industry 179 (2026) 104495
This work presents a low-cost RGBD-equipped uncrewed aerial system for automated rebar layout inspection in construction settings. Drone-based data acquisition is combined with point cloud processing, Sobel edge detection, and Hough transformation to estimate rebar spacing from RGBD data. Controlled tests identified a horizontal flight pattern at approximately three feet as the most accurate approach, and field validation on vertical rebar at an active construction site achieved an average spacing measurement error of 0.44 mm.
Mahsa Sanei, Piedad Miranda-Chiquito, G. Matthew Fricke, and Fernando Moreu.
Mechanical Systems and Signal Processing 256 (2026) 114462
A non-contact displacement monitoring system combines a camera, laser rangefinder, and inertial measurement unit through an adaptive Extended Kalman Filter. Designed for future deployment on uncrewed aerial vehicles, the approach compensates for platform motion while estimating transverse bridge displacement. Sensor fusion reduced peak error by 69% and RMSE by 68%, substantially improving accuracy under realistic UAV motion conditions.
Jannatul Ferdous, G. Matthew Fricke, Judy Cannon, and Melanie Moses
Scientific Reports 15.1 (2025)
The adaptive immune response appears remarkably insensitive to body size despite large differences in metabolism among mammals. Analytical models and simulations suggest that first-contact time between immune cells decreases superlinearly with population size. These results help explain how large animals can mount immune responses as rapidly as much smaller species.
Christopher P. Kempes, Michael Lachmann, M. Redwan Chowdhury, Sara I. Walker, Andrew Iannaccone, G. Matthew Fricke
, and Leroy Cronin
Nature Complexity 2 (1), 27 (2025) (PDF hosted here embargoed until May 2026)
This paper places Assembly Theory, a method of measuring the complexity of molecular objects and therefore their likelihood as a biosignature, in context with existing complexity measures. We show that Assembly Theory is distinct from previous measures and include a proof that it is NP-complete.
J. Jake Nichol, Michael Weylandt, G. Matthew Fricke, Melanie E. Moses, Diana Bull, Laura P. Swiler.
JGR Machine Learning and Computation (2025)
Causal Space-Time Stencil Learning (CaStLe) makes causal discovery tractable in high-dimensional spatiotemporal observational datasets. The method uses repeated local patterns in space and time to recover causal structure in strongly correlated Earth system data. The result enables more interpretable cause-and-effect analysis in complex climate systems.
Tracy Marie Wenzl, Ruben D. Lopez-Parra, Vanessa Svihla, Tito Busani, G. Matthew Fricke
ASEE Annual Conference (2025)
This paper uses social network analysis to examine how students in engineering and computer science teams perceive psychological safety and interpersonal closeness. By comparing stable versus shifting team structures, the work identifies patterns in networks that relate to team experience and suggests directions for instructional practice that support effective collaboration.
Janatul Ferdous, G. Matthew Fricke, and Melanie Moses.
Journal of Computational Biology (2024)
First-contact time decreases strongly as the number of searchers increases. Theory and simulations show that this relationship is largely independent of the details of individual movement. The result provides a general explanation for why larger populations, from immune cells to foraging animals, tend to find targets faster.
Tobias Fischer et al.
Bulletin of Volcanology (2024)
Carbon-13 measurements from the 2023 Litli Hrútur eruption in Iceland reveal how CO₂ emissions changed as magma degassed. Isotopic signals are tracked over the course of the eruption and used to quantify CO₂ release. The study improves estimates of volcanic carbon emissions and provides a clearer picture of how degassing unfolds in real time.
John Ericksen et al.
Atmospheric Measurement Techniques (2024)
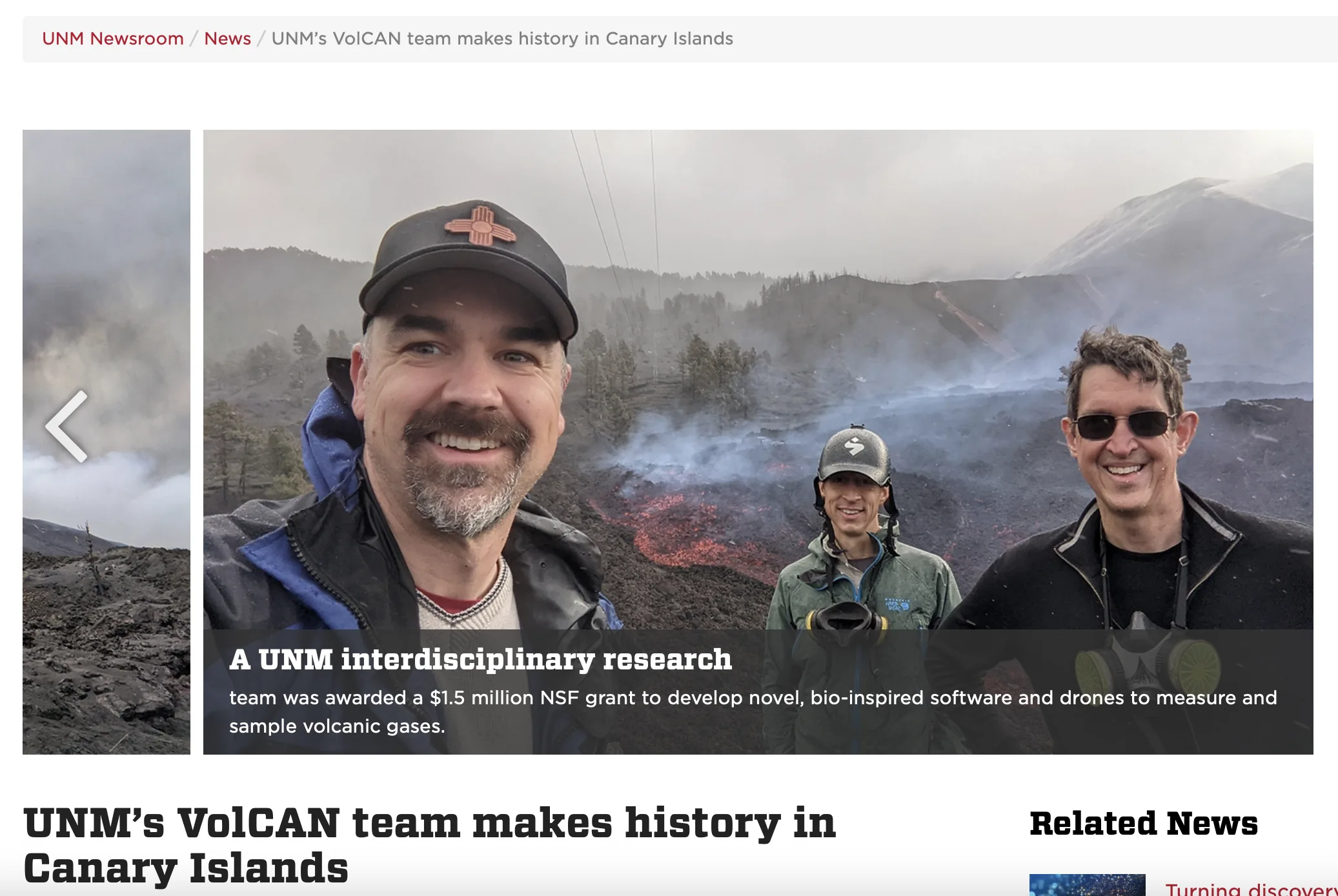
Drone-based sample return missions can safely collect CO₂ isotope measurements from volcanic plumes during active eruptions. The resulting isotope ratios support inference of eruption depth and carbon emission dynamics. This work represents the first drone-based sample return mission within a CO₂ plume.
Roya Nasimi, Fernando Moreu, and G. Matthew Fricke.
Sensors (2023)
Small sensor-equipped unmanned aerial systems provide a practical method for non-contact bridge inspection. Field deployments demonstrate how aerial platforms can safely collect structural measurements while reducing the cost and risk of traditional inspection approaches. The work highlights the growing role of autonomous sensing in infrastructure monitoring.
John Ericksen et al.
Frontiers in Control Engineering (2022)
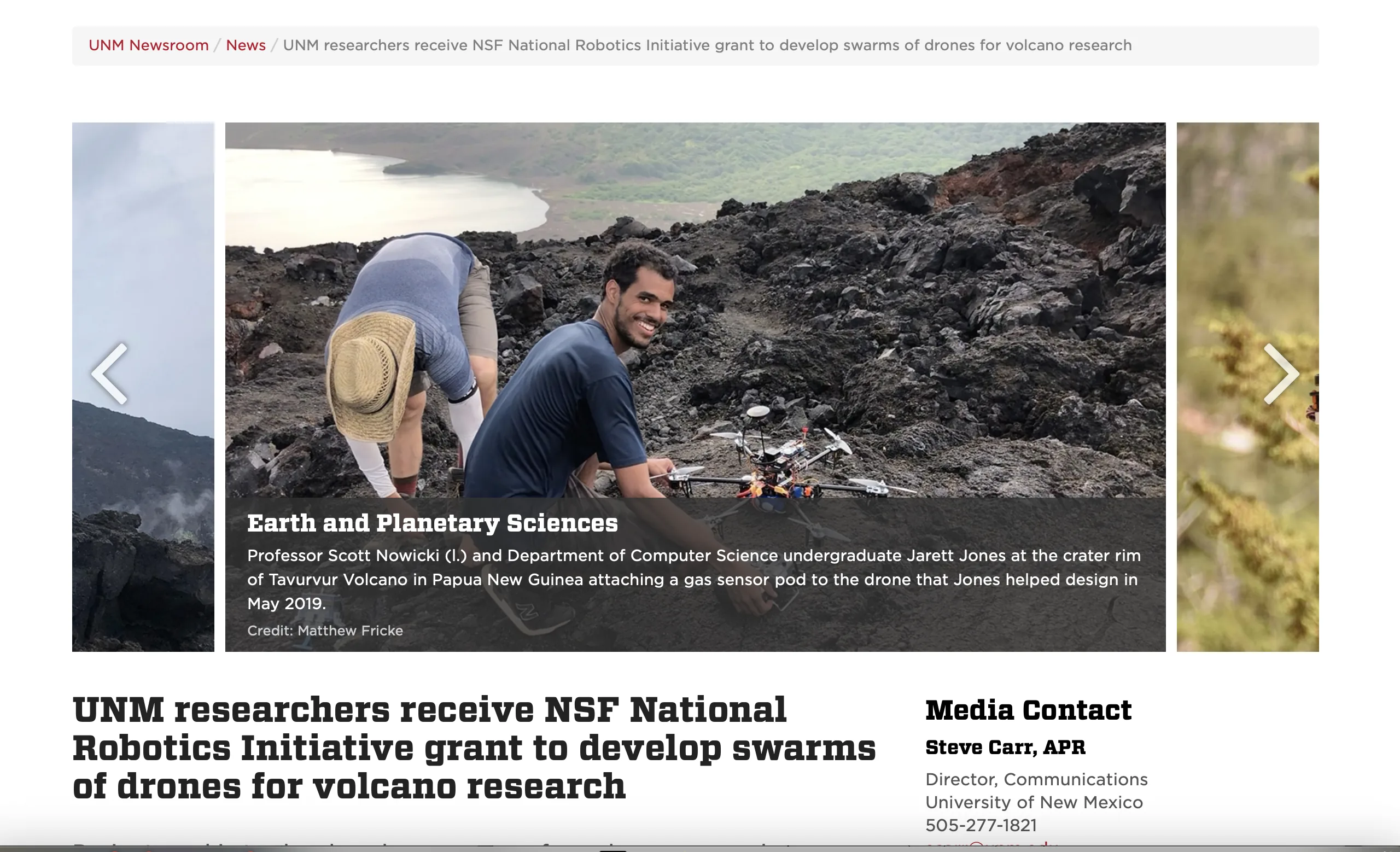
A fleet of cooperating UAVs maps CO₂ emissions at the Valles Caldera Supervolcano using coordinated flight patterns. Simple flocking rules and real-time planning allow the drones to cover large, complex plumes and terrain efficiently. The results show that multi-robot aerial surveys can collect high-resolution volcanic gas data in environments that are otherwise inaccessible.
Hillary H. Smith et al.
Life 11, 498 (2021)
The transition from nonliving chemistry to living systems is better understood as a gradual, “gray” continuum than as a strict binary. Proposed origin-of-life pathways are compared through informational and structural complexity. The work clarifies how life’s beginnings can be assessed in laboratory systems and planetary environments.
Nichol, J. Jake; Matthew G. Peterson; Kara J. Peterson; G. Matthew Fricke; Melanie E. Moses.
Journal of Computational and Applied Mathematics (2021)
Machine learning feature analysis reveals where E3SM climate model outputs diverge from observed climate change. The analysis identifies model features that drive key differences from observations and exposes systematic biases in represented climate processes. These results provide guidance for improving future climate model development.
Emily J. Liu et al.
Science Advances 6(44), eabb9103 (2020)
Drones and aerial platforms make volcanic gas measurements possible at volcanoes that are too dangerous or inaccessible for direct human sampling. Coordinated airborne surveys resolve high-resolution gas concentration and flux patterns that ground methods miss. The work expands the ability to quantify volcanic degassing for hazard assessment and volcano–atmosphere science.
Qi Lu, G. Matthew Fricke, John C. Ericksen, and Melanie E. Moses.
Current Robotics Reports (2020)
Swarm foraging research shows a persistent gap between theoretical guarantees and fieldable robotic systems. This review compares idealised algorithms with implementations in robots and other physical systems. The discussion identifies strategies for making collective search more robust in real-world environments.
Rotem Botvinik-Nezer et al.
Nature (2020)
In this paper dozens of research teams independently analyzed the same functional MRI dataset to see how much their results would vary. We show that different analysis choices lead to substantial differences in statistical outcomes, even when teams use broadly accepted methods. The work highlights how flexible analytical decisions can affect scientific conclusions and underscores the need for transparency and robustness in data analysis.
Tasnim, Humayra et al.
Frontiers in Immunology 9 (2018)
Detailed microscopy and image analysis quantify how naïve T cells associate with dendritic cells, fibroblastic reticular cells, and blood vessels inside lymph nodes. The spatial distribution of these interactions varies across lymph node regions. The results support models of how immune search and signalling unfold in real tissue.
Paulus Mrass et al.
Nature Communications (2017)
ROCK activity regulates the intermittent, stop-and-go mode of T cell migration in inflamed lung tissue. Experiments show how this molecular pathway shapes immune cell movement through complex tissue environments. The results identify a key regulator of immune search behaviour during inflammation.
Fricke, G. Matthew et al.
PLoS Computational Biology 12(3): e1004818 (2016)
Computational models show how T cells balance broad exploration with detailed local search during immune responses. Adaptive movement allows cells to persist in promising regions while still covering new ground efficiently. The framework helps explain how immune cells optimise search strategies in complex tissues.
G. Matthew Fricke, Joshua Hecker, Judy Cannon, and Melanie Moses.
Robotica 34(8) (2016): 1791–1810
Immune cell behaviour provides design principles for robot swarms operating in complex, fractal-like environments. Lévy-style movement patterns interact with environmental structure to improve search efficiency when targets are sparse and unevenly distributed. The results connect immune-inspired search to the geometry of real-world spaces.
T. P. Flanagan et al.
PLoS ONE (2012)
Harvester ant foraging depends strongly on colony size and the spatial distribution of food. Field observations and quantitative models show that larger colonies and clustered food patches can produce faster, more efficient foraging. The results explain how social insects tune collective search to environmental structure.
Bin Hu; G. Matthew Fricke; James R. Faeder; Richard G. Posner; William S. Hlavacek.
Bioinformatics (2009)
GetBonNie is a software tool for constructing, analysing, and sharing rule-based biochemical models without writing code by hand. The tool helps researchers visualise complex reaction networks and collaborate on model development. The result makes mechanistic modelling of molecular systems more accessible and efficient.
G. Matthew Fricke; James L. Thomas.
Biophysical Chemistry 119(2) (2006): 205–211
Monte Carlo simulations show how interactions between cell membranes can drive receptors to cluster together. Simple physical forces between membranes produce aggregation patterns similar to those observed in real cells. The results help explain how membrane organisation can influence signalling without requiring specific biochemical drivers.
John Ericksen et al.
IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR) (2024)
A boundary-tracing algorithm enables unmanned aircraft to monitor volcanic plumes efficiently on real flight hardware. The work connects a theoretically motivated sensing strategy to the constraints of physical vehicles, noisy sensors, and turbulent environments. The result shows how abstract plume-tracking algorithms can be made robust enough for real-world deployment.
Qi Lu, G. Matthew Fricke, Takaya Tsuno, and Melanie E. Moses.
IEEE/RSJ International Conference on Intelligent Robots and Systems (2020)
A deterministic search pattern is compared with a bio-inspired stochastic foraging strategy based on ant behaviour. Simulation and physical robot experiments show that the stochastic strategy is more robust to environmental noise and uncertainty when conditions differ from ideal assumptions. The results highlight the importance of testing theoretical swarm algorithms on real hardware.
Ericksen John et al.
IEEE Robotics and Computing Conference (IRC) (2020)
LoCUS is a fault-tolerant tree data structure that lets teams of aerial robots coordinate volcanic surveys despite communication failures and the loss of multiple drones. The structure maps naturally onto the physical layout of the survey region, allowing failures to degrade coverage gracefully rather than catastrophically. The work frames the swarm itself as a unit of intelligence and action.
Abhinav Aggarwal et al.
IEEE/RSJ International Conference on Intelligent Robots and Systems (2019)
The quantifies how much performance is lost when central-place foraging algorithms have unreliable target information. Upper bounds on complete collection time are proved for several algorithm families. The analysis explains how site fidelity and search overlap influence distributed foraging efficiency.
Lu, Qi et al.
IEEE/RSJ International Conference on Robotics and Automation (2019)
Two swarm foraging algorithms, an ant-inspired stochastic strategy and a deterministic spiral search, are compared in simulation and on real robots. The deterministic spiral performs best in idealised simulation, while the ant-inspired strategy is more robust to physical noise, obstacles, and real-world errors. The results show how physical reality can change algorithm rankings.
Aggarwal et al.
PODC (2019)
The price of ignorance measures how much performance is lost when foraging algorithms lack knowledge of target locations. Analytical results show how site fidelity and reduced search overlap improve collection time. The work clarifies the algorithmic factors that govern efficiency in distributed foraging systems.
Fricke et al.
IROS (2016)
A distributed spiral search algorithm guarantees complete coverage of a search area by a swarm without central coordination. Each agent follows a deterministic spiral pattern while sharing minimal information, allowing the team to explore space systematically without gaps. The work links provable coverage guarantees to practical swarm implementations.
Fricke et al.
GECCO (2015)
Adaptive search can be distinguished from purely random search in both robot swarms and immune T cells. The analysis focuses on behavioural signatures of adaptation rather than assuming that complex motion necessarily implies adaptive behaviour. The work clarifies what it means for a biological or robotic system to search adaptively.
Fricke et al.
ECAL (2013)
Patterns of T cell movement observed in biological tissues are translated into search algorithms for robotic swarms. Movement statistics such as pause-run behaviour map naturally onto simple control rules for microcontroller-based robots. The results show how immune cell motion can inform practical distributed search designs.
Flanagan et al.
IEEE SSCI – ALIFE (2011)
Ant colonies convert information into food through collective foraging and environmental feedback. Efficiency emerges not from better individual decisions but from storing and amplifying information in the environment, especially through pheromone trails. The work reframes foraging as an information-processing problem.
Claiborne et al.
UNM-NASA PURSUE Conference (2000)
A robot control architecture can produce high-level behaviour from interactions among simple components rather than from explicit top-down programming. Representations of space and task-relevant features arise naturally as the system operates. The results illustrate how embodied control architectures can produce adaptive behaviour through emergence.
S. Gipson Rankin et al.
This white paper responds to a proposed HUD rule on implementation of the Fair Housing Act’s disparate impact standard. Legal and policy analysis identifies practical concerns about enforcement, fairness, and unintended consequences. The document offers constructive feedback aimed at improving clarity and equity in housing discrimination evaluation.
V. Meadows et al.
The Biosignatures Standards of Evidence Workshop brought together scientists to define what constitutes credible evidence for life detection. This community report outlines consensus standards, evaluation criteria, and remaining gaps. The document guides future research and mission planning by clarifying how biosignature evidence should be assessed across disciplines.
Suderman, Ryan; G. Matthew Fricke; William S. Hlavacek.
In Modeling Biomolecular Site Dynamics, Methods in Molecular Biology vol. 1945
RuleBuilder provides a graphical interface for defining and visualising BioNetGen-language patterns and reaction rules. Interactive examples show how the tool simplifies construction and interpretation of complex rule-based biochemical models. The chapter helps researchers build, debug, and share mechanistic models more effectively.
Moses, Flanagan, Letendre, and Fricke.
In Handbook of Human Computation, Springer (2014)
Ant colonies solve distributed problems through simple local interactions and environmental feedback. Their collective behaviours, including pheromone deposition and recruitment, can be viewed as forms of distributed information processing. The chapter highlights principles from social insects that can inform human and computational systems without central control.